System Architecture and Hardware Selection
In 2026 UAV operations, vision-based precision landing systems are essential to overcome GPS errors (typically 2–5m). This project utilizes Jetson Nano as the edge computing device, Intel RealSense D435i for depth data acquisition, and Pixhawk as the flight controller (FC).

Data flow: Jetson Nano receives RGB-D streams from the D435i, detects the landing pad using a YOLOv8 model, and correlates the center coordinates with the depth map to calculate 3D relative distance. Finally, it sends LANDING_TARGET messages to the Pixhawk via pymavlink to drive ArduPilot’s autonomous landing algorithm. Prerequisites include securing USB 3.0 bus bandwidth and locking the Jetson Nano to 10W power mode for stable operation.
Improving Model Generalization via Synthetic Dataset Generation
Due to limitations in real-world data collection, a synthetic dataset generation script using OpenCV was implemented. Landing pad PNG images are randomly composited onto various asphalt and concrete background images. It is crucial to apply perspective transformation using cv2.getPerspectiveTransform to simulate drone approach angles.
import cv2
import numpy as np
def apply_perspective_transform(image, src_points, dst_points):
matrix = cv2.getPerspectiveTransform(src_points, dst_points)
result = cv2.warpPerspective(image, matrix, (image.shape[1], image.shape[0]))
return result
# Synthetic data generation logic for landing pad augmentation
This script secured 1,000 training images including brightness variations, motion blur, and geometric distortion in a short time. This significantly reduced detection failure rates during field testing.
YOLOv8 Training and TensorRT Export Process
Jetson Nano CPU resources are extremely limited; using PyTorch models (.pt) directly for inference drops FPS to 2–5, causing fatal latency in flight control. Conversion to TensorRT is mandatory to resolve this.
The YOLOv8-nano model is trained on a high-performance desktop (RTX 4090 environment), followed by engine file generation on the Jetson Nano.
# Exporting YOLOv8 model to TensorRT format on Jetson Nano
yolo export model=best.pt format=engine device=0 half=True
Export Log Example
TensorRT: starting export with TensorRT 8.2.1...
TensorRT: input "images" with shape(1, 3, 640, 640) DataType.HALF
TensorRT: output "output0" with shape(1, 84, 8400) DataType.HALF
TensorRT: export success, saved as best.engine (14.2 MB)
By specifying half=True (FP16), a throughput of 35+ FPS was secured on the Jetson Nano while maintaining inference accuracy.
Depth Mapping and 3D Coordinate Transformation with RealSense D435i
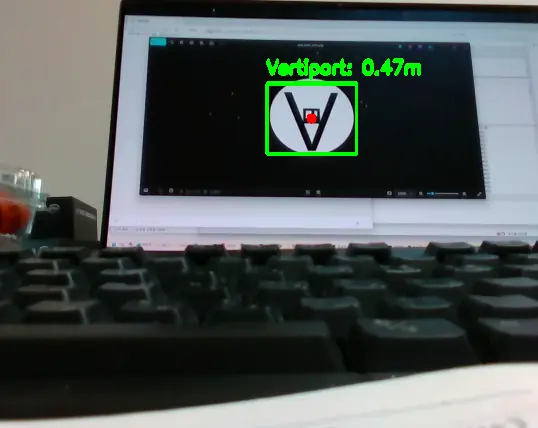
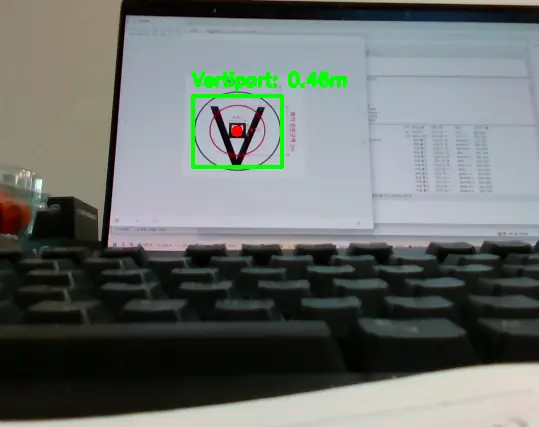
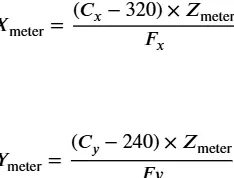
The detected bounding box center (u, v) is correlated with the RealSense depth frame. Since single-pixel depth values are susceptible to noise, filtering is implemented to average a 5x5 pixel area around the center.
def get_filtered_depth(depth_frame, x, y, window_size=5):
depth_roi = depth_frame[y-window_size:y+window_size, x-window_size:x+window_size]
valid_depths = depth_roi[depth_roi > 0]
return np.mean(valid_depths) if len(valid_depths) > 0 else 0
This coordinate data is packed into a MAVLink message after applying a rotation matrix that accounts for the camera’s mounting angle (pitch).
Sending LANDING_TARGET via MAVLink
pymavlink is used to transmit the calculated relative coordinates to the Pixhawk. Upon receiving the LANDING_TARGET message, ArduPilot integrates it into the internal EKF3 filter and initiates position correction during the landing phase.
from pymavlink import mavutil
def send_landing_target(connection, x_rad, y_rad, distance):
connection.mav.landing_target_send(
0, 0, mavutil.mavlink.MAV_FRAME_BODY_NED,
x_rad, y_rad, distance, 0, 0
)
Troubleshooting: Inference Latency and Communication Instability
1. Thermal Throttling during TensorRT Execution
Symptom: FPS drops sharply from 30 to 12 approximately 10 minutes after starting inference.
Cause: Jetson Nano SoC temperature exceeded 80°C, triggering frequency scaling.
Fix: Executed jetson_clocks to lock fan speed to maximum and replaced the stock cooler with a larger physical heatsink.
2. RealSense USB 3.0 Recognition Error
Symptom: Frequent RuntimeError: Frame didn't arrive within 5000.
Cause: Insufficient power supply to the USB bus on the Jetson Nano carrier board.
Fix: Resolved by connecting the D435i via an externally powered USB 3.0 hub or switching Jetson Nano power input to the DC jack (5V 4A).
3. MAVLink Message Packet Loss
Symptom: LANDING_TARGET received intermittently by the Pixhawk.
Cause: Buffer overflow due to insufficient serial baud rate (115200bps).
Fix: Increased baud rate to 921600bps and explicitly set SERIAL1_PROTOCOL=2 (MAVLink 2).
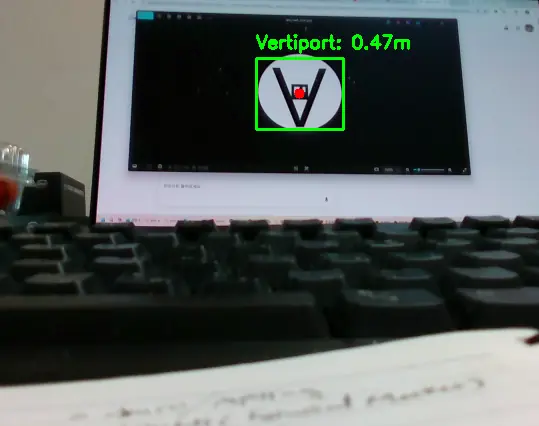
System Verification and Operational Test Results
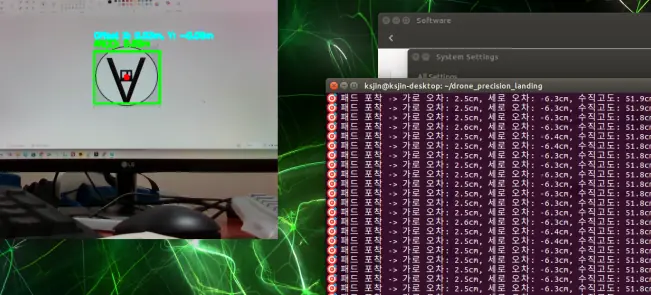
System verification was conducted with an auto-landing sequence from an altitude of 5m. Target correction status just before touchdown is documented in the operational log.
Operational Log: Landing Target Tracking Status
[INFO] Target Detected: x=0.12m, y=-0.05m, dist=3.42m | FPS: 36.2
[INFO] Target Detected: x=0.08m, y=-0.02m, dist=2.15m | FPS: 35.8
[INFO] Target Detected: x=0.01m, y=0.01m, dist=0.85m | FPS: 36.1
[SUCCESS] Precision Landing Completed. Offset: 4.2cm
Results confirmed final landing accuracy within an 8cm radius of the center, a significant improvement over the ~2.5m error of standalone GPS. Furthermore, TensorRT acceleration enabled the system to track the target without lag even during rapid drone attitude changes.
Conclusion and Operational Considerations
This system provides a practical solution for synchronizing AI inference and depth sensing under the constrained resources of a Jetson Nano. For operation, it is recommended to switch logic based on the RealSense depth range (approx. 0.3m–10m for D435i): use only YOLO 2D detection above 10m and integrate depth data below 10m.
For night operations, physical measures such as maximizing IR projector output or placing active light sources (LED markers) on the landing pad will contribute to improved detection stability.